
凭良学校-工业机器人操作编程培训 ABB、库卡、安川、发那科、电装、雅马哈、爱普生、众为兴、三菱、国产机器人共十种品牌。四轴和六轴的机器人都有教学 可免费预约现场试听了解 咨询电话:13724486198 咨询微信:13724486198 我校简介: “东莞市厚街凭良远程职业培训学校”创办于2000年,我们心怀爱与责任,教学专业有工业电路板...


凭良学校-工业机器人操作编程培训
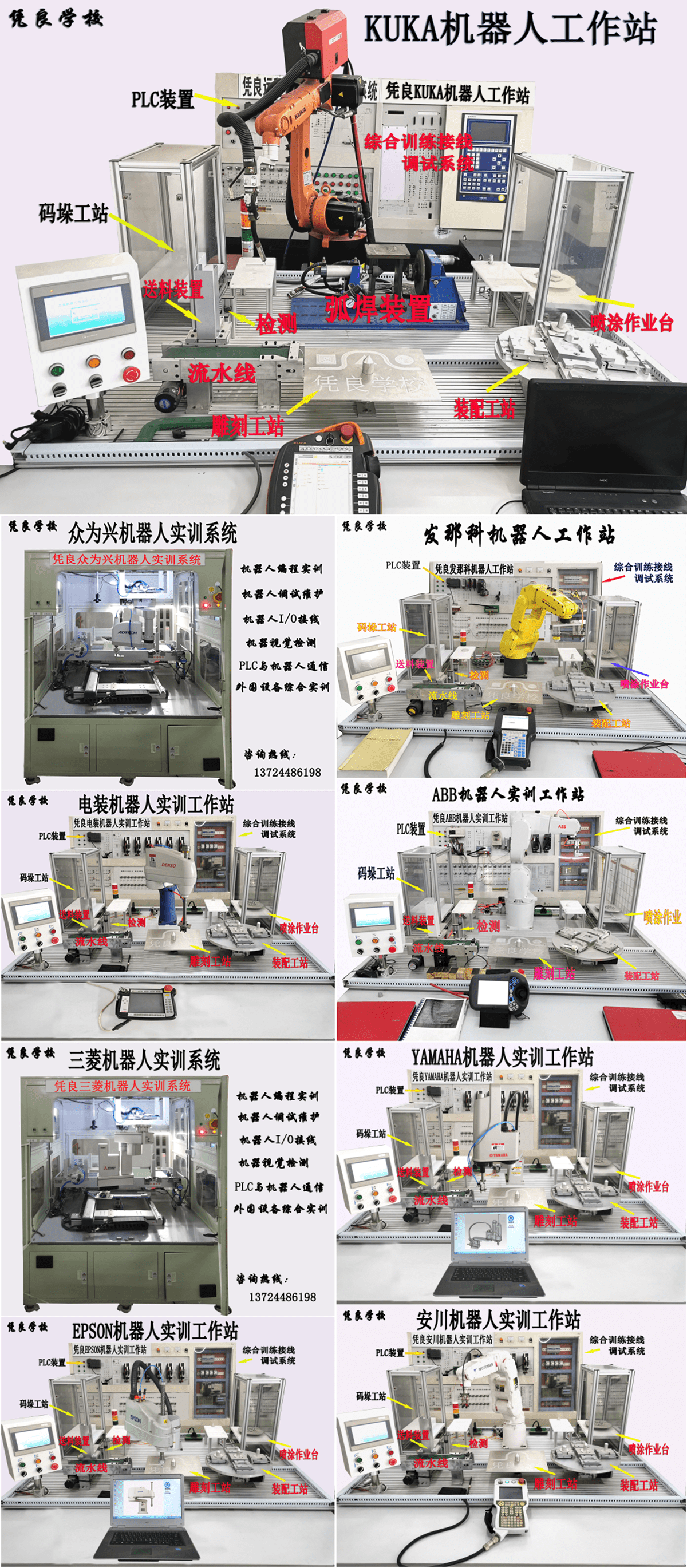
ABB、库卡、安川、发那科、电装、雅马哈、爱普生、众为兴、三菱、国产机器人共十种品牌。四轴和六轴的机器人都有教学 可免费预约现场试听了解
咨询电话:13724486198 咨询微信:13724486198
我校简介:
“东莞市厚街凭良远程职业培训学校”创办于2000年,我们心怀爱与责任,教学专业有工业电路板维修培训(变频器、伺服驱动器、缝纫机电控、数控、机器人等..)、PLC自动化编程与应用培训(三菱、西门子、欧姆龙、信捷等..)、工业机器人操作编程培训(ABB、库卡、安川、发那科、电装、雅马哈、爱普生、众为兴、三菱、国产机器人共十种品牌。四轴和六轴的机器人都有教学)、数控机床维修接线调试培训、数控车床操作编程培训、UG产品设计培训、CNC电脑锣操作编程、工业缝纫机维修培训、考证培训(电工考证、焊工考证)、家电维修培训(空调制冷、液晶电视机、洗衣机、冰箱、电磁炉、电饭锅...)、solid works 3D机械设计培训、机器视觉培训、办公软件培训、电子商务培训、建站推广培训、制图设计培训、会计培训、平面设计软件培训、AUTOCAD制图培训等课程。同时经营“凭良机电维修有限公司”,为富士康集团有限公司维修供应商,长期维修其各类变频器、伺服驱动器、伺服电机、贴片机、真空泵、2D工业相机、扫描抢、板卡、内存条、触摸屏、机器人示教器、发那科加工中心主轴等等..
报名多项课程一起学习更优惠...同时我校部分课程有开设远程学习班和视频教程出售,如地区较远不方便来校学习,可选择远程班学习或购买视频教程自学。咨询更多请加我校招生老师微信:13724486198(支持视频参观我校现场。)

培训费用:
1)培训费:(ABB、库卡、安川、发那科、电装、雅马哈、爱普生、众为兴、三菱、国产机器人共十种品牌。四轴和六轴的机器人都有教学。)单选一种2980元;选任意四种或以上享受五折优惠。与PLC编程,电路板维修一起学习更多优惠。
2)一期不会可免费继续学习,不重复收费。
3)报名即免费赠送我校自主研发的配套视频教程和一本配套书籍教材。
优惠活动:
学四种享五折优惠,仅需5980元。学十大品牌9800元。如无PLC基础,建议学四大家族机器人 + 三菱和西门子PLC共9800元。
预报名请电话咨询:13724486198 龚老师。
培训形式:
1)现场培训。
2) 理论与实操结合。教学设备都摆在课室中,学员可以直接操作设备进行维修实践,老师指导。结业后也可随时回校复习。
3) 我们会结合专业培训学校和工控维修公司两种不同教学模式的优点来培训学员,教学以实物实操实践为主,注重动手能力和实际操作效果。争取让学员用最短的时间来学习更多的知识,尽职尽责尽快教会学员掌握技术。
培训时间:
此课程有随到随学业余制模式,也有全日制学习模式,详情请致电咨询:13724486198 谢谢。
培训目标:
1)通过培训能实际上手做项目
2)通过培训能直接从事工业机器人操作编程工作
报名方式:
联系电话 0769-85759443 或手机 13724486198 微信:13724486198
培训地点:
广东省东莞市厚街镇溪头天桥旁凭良技校。导航“凭良学校”即可。
课程内容及课程安排表:
ABB机器人在线编程:
第一章:工业机器人安全注意事项
第二章:构建基础练习用的工业机器人虚拟工作站
第三章:工业机器人的基本操作:1、认识示教器配置必要的操作环境;2、查看ABB工业机器人常用信息与事件日志;3、ABB工业机器人数据的备份与恢复;4、ABB工业机器人的手动操纵;5、ABB工业机器人转数计数器的更新操作。
第四章:ABB工业机器人的1/O通讯:1、认识ABB工业机器人1/0通讯的种类;2、认识常用ABB标准1/0 板;3、ABB标准I/0板配置(DSQC651板的配置、DSQC652板的配置);4、I/0信号的监控与操作;5、系统输入/输出与I/0信号的关联;6、示教器可编程按键的使用;7:安全保护机制的设置。
第五章:ABB工业机器人的程序数据:1、认识程序数据;2、建立程序数据的操作;3、程序数据的类型分类与存储类型;4、常用程序数据说明;5、三个关键程序数据的设定。
第六章:ABB工业机器人程序管理:1、理解什么是任务、程序模块和例行程序;2、掌握常用的RAPID编程指令;3、建立一个可以运行的基本RAPID程序;4、中断程序TRAP;5、创建带参数的例行程序;6、功能FUNCTION的使用;7、RAPID程序指令与功能讲解;8、码垛程序案
等等...
ABB离线编程:
第一章:认识与安装RobotStudio
第二章:RobotStudio软件介绍
第三章:构建基本的工作站
第四章:建立机器人系统和手动操作
第五章:机器人的手动操作
第六章:工件坐标系的建立
第七章:建模功能
第八章:机械装置的创建
第九章:创建机器人的工具
第十章:机器人离线轨迹编程
第十一章:smart组件的使用
第十二章:吸盘的创建
第十三章:为离线编程做准备
第十四章:功能的基本介绍
第十五章:创建工作站数据
第十六章:实际工作站的演示
第十七章:Rapid 的使用
等等...
发那科机器人:
1、发那科机器人简介和注意事项 实训
2、发那科示教器使用 实训
4、坐标系的设置 实训
5、程序管理 实训
6、程序指令 实训
7、执行程序 实训
8、非运动指令 实训
9、程序练习 实训
10、I/O信号 实训
11、机器人I/O接线实操练习 实训
12、外部信号控制及自动运行 实训
13、设置基准点 实训
14、宏指令 实训
15、文件的备份和恢复 实训
16、零点复归 实训
17、常见报警的恢复和基本保养 实训
18、建立一个可以运行的RAPID程序 实训
19、创建带参数的例行程序 实训
20、RAPID程序指令与功能讲解 实训
21、建立一个码垛程序 实训
等等...
安川机器人
1、安川机器人简介和注意事项 实训
2、安川示教器使用 实训
3、控制组和坐标系 实训
4、工业机器人的基本操作 实训
5、原点位置校准 实训
6、用户坐标系的设定 实训
7、常用运动指令及附加项说明 实训
8、新建程序和编制程序 实训
9、程序验证和修改 实训
10、程序再现和程序管理 实训
11、便利功能和变量及应用 实训
12、工业机器人输入/输出状态查看 实训
13、机器人I/O接线和外部信号控制 实训
14、通用搬运案例 实训
15、移动指令 实训
16、输入/输出指令 实训
17、Workvisual开发环境
18、故障诊断
19、搬运应用案例 实训
20、弧焊应用案例 实训
等等...
库卡机器人示教器编程培训:
第一章了解工业机器人及安全注意事项:
1.1KUKA 机器人的型号
1.2 KUKA 机器人安全注意事项
第二章KUKA 机器人的基本操作:
2.1 KUKA 机器人系统的机构和功能
2.1.1 KUKA 机器人系统组成
2.1.2 KUKA机器人的机械系统
2.1.3 KUKA机器人控制系统KRC4
2.2认识示教器--配置必要的操作环境
2.2.1 KUKA smartHMI操作界面
2.2.2 设定 smartPAD的显示语言
2.2.3 正确使用确认键
2.2.4查看KUKA机器人使用信息
2.3 KUKA机器人数据的备份与恢复
2.4 KUKA 机器人的手动操纵
2.4.1选择并设置运行方式
2.4.2 单轴运动的手动操纵
第三章KUKA机器人编程基础:
3.1机器人的基本运动
3.1.1与KUKA机器人运动相关的坐标系
3.1.2 KUKA机器人在世界坐标系中的运动
3.1.3KUKA机器人在工具坐标系中的运动
3.2 机器人的零点标定
3.3机器人上的负载
3.3.1工具负载数据
3.3.2 机器人上的附加负载
3.3.3 测量基坐标
3.4 执行机器人程序
3.4.1 执行初始化运行
3.4.2 选择和启动机器人程序
3.5程序文件的使用
3.5.1创建程序模块
3.5.2编辑程序模块
3.5.3存档和还原机器人程序
3.5.4通过运行日志了解程序和状态变更
3.6 建立和更改程序
3.6.1创建新的运动指令
3.6.2 创建优化节拍时间的运动
3.6.3创建沿轨迹的运动
3.6.4更改运动指令
3.6.5逻辑编程
3.6.6等待功能的编程
3.6.7简单切换功能的编程
3.6.8轨迹切换功能编程
第四章KUKA机器人编程:
4.1结构化编程
4.1.1创建结构化机器人程序的辅助工具
4.1.2创建程序流程图
4.2专家界面
4.2.1专家界面说明
4.2.2激活专家界面和纠错的操作步骤
4.3变量和协定
4.3.1KRL中的数据保存
4.3.2简单数据类型的创建
初始化和改变
4.3.3 KRL Arrays(数组)
4.3.4KRL结构
4.4子程序和函数
4.4.1局部程序
4.4.2 全局子程序
4.4.3将参数传递给子程序
4.4.4函数编程
4.5用KRL进行动力编成
4.5.1借助KRL给运动编程
4.5.2 借助KRL给相对运动编程
4.5.3计算或操纵机器人的位置
4.6系统变量编程
4.7 程序流程控制
4.7.1IF 分支的编程
4.7.2 循环编程
4.7.3 等待函数编程
4.8码垛程序实例
第五章 KUKA机器人弧焊实操
第六章 KUKA机器人的基本维护
等等...
库卡离线编程
KUKA仿真软件说明
1、熟悉虚拟示教器 0fficelite
2、SimPro界面认识及添加机器人模型
3、0fficeLite与SimPro联机及程序控制
4、KUKASimPro软件中的坐标系
5、Simpro运动指令
6、基本指令
7、IO控制指令
8、软件变量
9、程序数据
10、建模
11、生成自动路径
12、将SimPro离线程序导入到真实机器入中并调试运行
13、搬运码垛流水线应用
14、SimPro 生成 3D 图纸及视频文件
14.1、KUKA Sim Pro软件生成布局图纸
14.2、KUKA SimP软件生成动画视频
众为兴机器人
众为兴 SCARA 机器人的介绍
众为兴机器人的示教器认识
用户/工具坐标系标定
I/O 信号的认识与接线
工程的认识与建立
众为兴机器人的 AR 语言编程
编程中常用的指令
系统参数设置
安装向导
码垛
报警及错误处理
指令表
等等...
爱普生机器人
EPSON SCARA机器人
SCARA 水平多关节机器人概述
SCARA 机器人基础知识
EPSON 4 轴机器人的组成
电缆线连接
EMERGENCY 安全信号接线
输入输出信号接线
机器人工作空间
EPSON 编程软件简介及安装
EPSON RC+7.0 软件与机器人通信连接
EPSON RC+7.0 用户界面介绍
EPSON 机器人手动步进示教
机器人的关节运动与线性运动
重置编码器及原点校准
坐标系
工具坐标系的建立
本地坐标系的建立
软件示教及拖动示教
手臂姿态
EPSON 机器人 HOME 点设置及应用
程序结构
常用指令
输入输出指令
逻辑控制指令
直线运动程序案例
圆弧运动实例
搬运实例应用
EPSON 机器人电池更换
等等...
还有其他品牌机器人教学内容(电装、雅马哈、三菱、国产机器人共十种品牌。四轴和六轴的机器人都有教学。)请来电咨询:13724486198(微信同号),谢谢。
我校部分现场图(了解更多可加微信或QQ视频实时参观现场,绝对真实。微信:13724486198,QQ:653595396)



4586人已参与评分
